Darbots FTC SharedLib
Darbots FTC SharedLib is an opensource library, initiated and maintained by DarBots, primarily for the ease of development of the FTC competition softwares.
To view the code, see Our Repository
Documentation Version: V4.5.0 Alpha
Major advantages
- Advanced Motion Profiling / Pure Pursuit with PIDF control for Robot Movements.
- Position Tracker based on Active Wheel Encoder / Passive Wheel Encoder + Vuforia.
- Wrapped up season game element recognition classes. (Tensorflow Skystone Recognition + Vuforia Skystone Recognition + DarBots Customized Vuforia Targets + PixelCounter Sampler)
- Prevention of DC Motor from stalling by adding a time limit to each motor movement
- Ability to use DC Motor as a servo (through encoders)
- Easy Logging functionalities.
- Ability to store informations on phone.
Tech Side
The Darbots FTC Shared Lib is established on asynchronous idea - no action on the robot blocks the execution of the code flow unless the programmer instructs to do so.
This library has went through 4 iterations and this is the official document for the 4th iteration.
The Darbots FTC Shared Lib used Divide and Conquer theory to establish a truly comprehensive solution to FTC programming. Instead of writing codes in a single java class, we divide sensors, calculations and specific mechanisms into separate java classes, and organize the robot’s controlling code into a class called RobotCore, which both Autonomous and TeleOp OpModes can use those collaborating modules through initializing a single RobotCore class. Divide and Conquer gives us many advantages such as collaboration between parts, ease of debugging and more fallback mechanisms.
Compare and contrast
| FTC Native Code | Darlington Shared Library Code |
|---|---|
| Cannot read rotations that a non-encoder attached motor went through | Can read approximations based on motor specifications |
| No unique control over chassises & usually the movement is controlled by time duration | Unique control over different chassises & controlled by encoder readings |
| No safety mechanism on linear slides, lifting devices, etc. | 3 unique approaches combining hardware and software to prevent hardware failure |
| No collaboration between parts, usually drivers manually move different modules to get out of the way of another module | Automated java class arranges the collaboration of parts |
| Blocking code flow structure | Asynchronous code flow structure |
| No position tracking software once lost navigation target | Encoder values calculation using Robot2DPositionTracker + vuforia navigation implemention |
| Different code of mineral sampling between webcam and phone | Both webcam and phone abstracted into RobotCamera, sampling function class accepts the abstract class as a parameter |
| Debugger difficulty | Global static class registers the telemetry and helps modules to easily register debug informations + Wrapped debugger that writes log files |
| Combo key that requires ordered movemnets usually blocks all controls | Combo key can be performed while other parts are allowed to move |
Async and Code Structures
In deciding whichever structure to use for our sharedlib, we choosed asynchronous. Compared to traditional FTC controlling softwares, asynchronous structure gives more possible action numbers in a fixed CPU time. Compared to multithreading, it gives programmers no potential problem about thread lock and shared memories. Here is a graph demonstration that helps you to get a better understanding of how asynchronous code structure works.
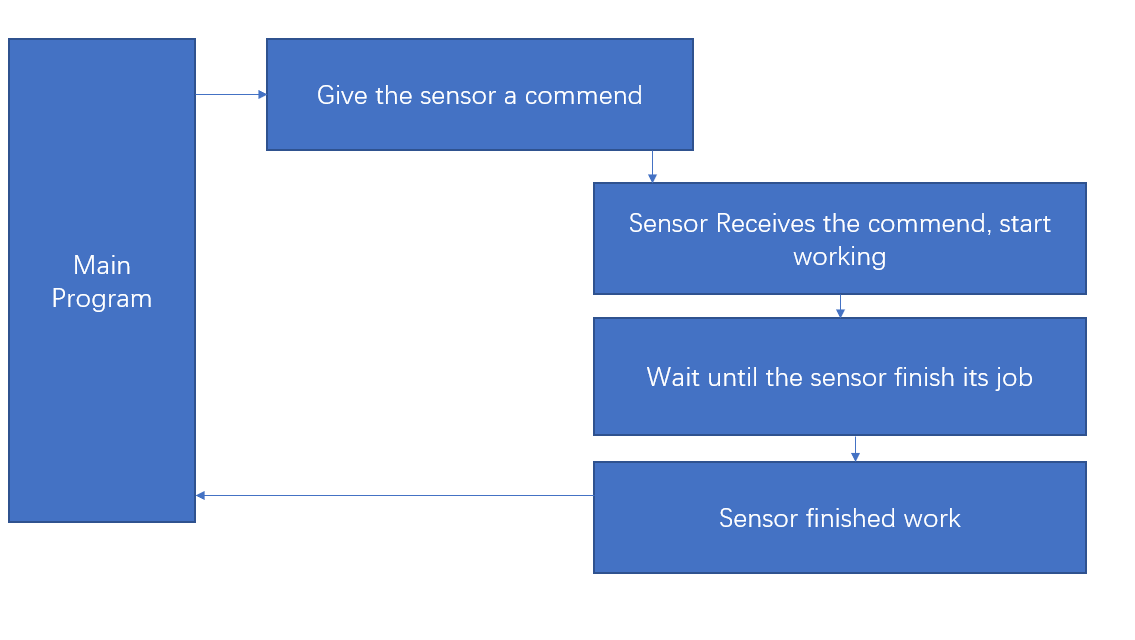
A traditional RC Code Structure always wait for a sensor to finish its job before executing other tasks and even if people think of asynchronous code in native FTC code, the code just looks awful.
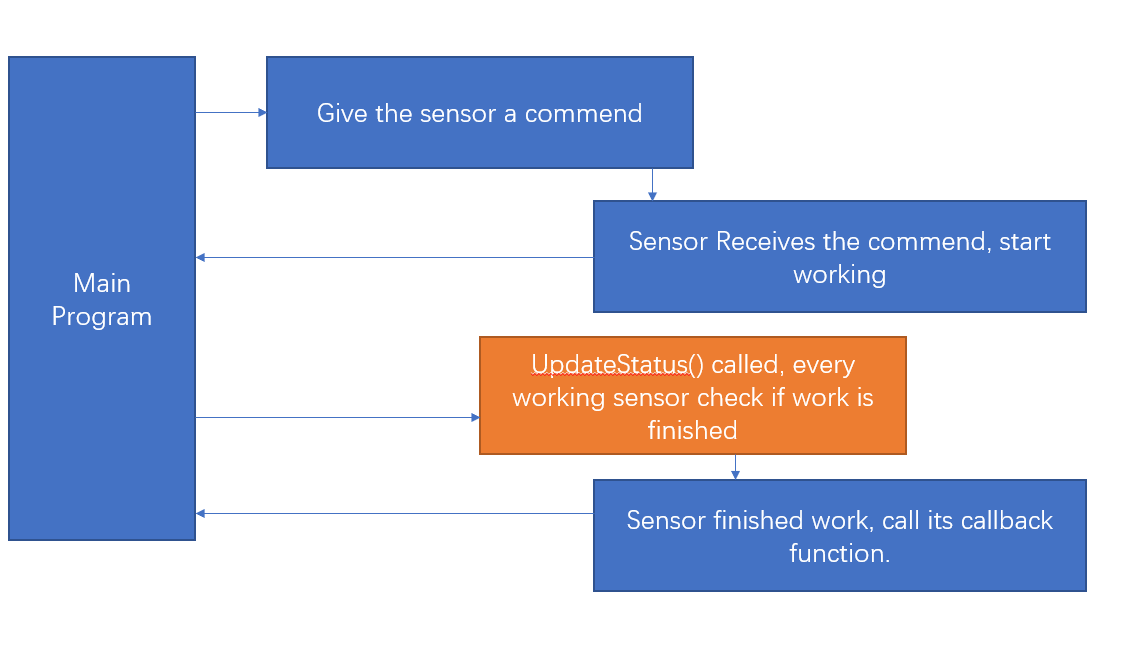
The async coding structure gives programmer the freedom to go back to the next code segment as long as the sensor recieved the order to perform a task. It does not wait for the sensor to finish, but programmers are asked to constantly call UpdateStatus() method to let the sensor to check whether its work is finished. Our library also gives a callback mechanism that allows code to be automatically executed after the sensor performed its job.
For the code structure, the library gives us a clearer understanding of autonomous and teleop codes.
After the comparison between native codes and the library codes, we can probably conclude that the library is more powerful and easier to code with.
Note: Passive / Active Wheel Position Trackers are the only exceptions to this code structure, the Library initializes a seperate thread for them, and all of their variables used are synchronized.
Understand the two axises
In order for the library to connect the building part and the programming part, we have to put parameters into the program. One of the most important parameters to understand is the two axises.
The two axies use the same basic class Robot2DPositionIndicator and Robot3DPositionIndicator to illustrate their datas.
Usually Robot2DPositionIndicator is used more often.
See Angles and Coordinates Definition
The basis of Async - RobotNonBlockingDevice
The RobotNonBlockingDevice is a java interface that standardizes all the behaviors of sensors that requires time to perform its job. It has three methods.
isBusy(), which tells if the sensor has been assigned any work to do.updateStatus(), which lets the sensor check if the work is done.waitUntilFinish()that gives programmer the ability to let the code to wait for the sensor to finish detecting before the next line of code gets executed.
Connecting Motors to the program - RobotMotorType
RobotMotorType is an java interface that gives a standardized interface for MotorControllers to get the specifications of motors / CR Servos.
The specifications stored in RobotMotorType include:
CountsPerRev, the number of channel rises for the motor to turn one cycle.RevolutionPerSecond, the number of cycles the motor can go through in one second.
Uniformly control encoder-attached motors and no-encoder attached motors - RobotMotor
RobotMotor is an interface that standardizes all motor behaviors and gives programmers the ability to let some motion parts to be encoder-optional.
RobotMotorWithEncoderuses encoder values for its speed control, position readings and etc.RobotMotorWithoutEncoderuses motor specifications inRobotMotorTypeto calculate rotations the motor went through.
Smooth motion, right now - RobotMotorController
RobotMotorController is a java class that gives the RobotMotor the ability to run tasks and automatically queue up tasks.
It accepts RobotMotorTask implementions to be put into its task list and gives callback ability to tasks getting executed.
RobotMotionSystem - the fundemental base of treating every chassis equally!
RobotMotionSystem is a java abstract class that gives uniform control over chassis.
it also have the ability to queue up motion tasks for the robot motion system.
It also put motors’ encoder values into the Robot2DPositionTracker class.
Robot2DPositionTracker - Where am I?
Robot2DPositionTracker is a class where our team put consideration of Mathematics into our programming.
Its input values are automatically feed by RobotMotionSystem, and programmers only need to read its values.